Bộ điều khiển chuyển động digital MPU9250 là bộ xử lý đa năng được giới thiệu bởi Asahi Kasei Microdevices Corporation.
MPU9250 là thiết bị giám sát chuyển động của 9 trục với 3 trục gia tốc kế, 3 trục từ kế và 3 trục con quay hồi chuyển được tích hợp vào một vi mạch nhỏ gọn.
DMP có ba Bộ chuyển đổi tín hiệu analog sang tín hiệu digital độ phân giải 16 bit để số hóa các kết quả đầu ra từ gia tốc kế, từ kế và con quay hồi chuyển. Thiết bị cũng có nguồn điện riêng cho các I / O digital, cảm biến nhiệt độ tích hợp và ngắt có thể lập trình.
Giao tiếp truyền thông MPU9250
Bộ xử lý MPU9250 có giao tiếp I2C để truyền dữ liệu nối tiếp ở tốc độ 400 kHz. Để giao tiếp nhanh hơn, nó cũng hỗ trợ giao tiếp với ngoại vi nối tiếp ( SPI ) tốc độ lên đến 20MHz. DMP cũng được cung cấp giao thức I2C hỗ trợ để giao tiếp với các cảm biến phi quán tính như cảm biến áp suất, v.v.
Hướng dẫn này sẽ nói về cấu hình chân, tính năng, thông số kỹ thuật, giao tiếp và ứng dụng.
Sơ đồ chân MPU0250
Sơ đồ sau đây cho thấy sơ đồ chân của Bộ xử lý chuyển động digital 9 trục MPU9250:
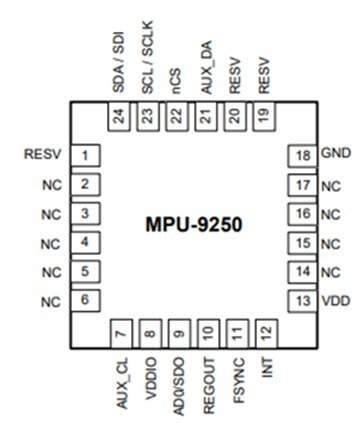
Cấu hình chân
Chip xử lý chuyển động digital 9 trục MPU9250 có tổng cộng 24 chân nhưng chỉ có 10 chân trong số đó là mở rộng cho bo mạch. Chi tiết cấu hình chân trong bảng được đề cập dưới đây:
| Số chân |
Tên chân |
Đặc điểm |
| 2-6, 14-17 |
NC |
Không có kết nối |
| 1 |
RESV |
Chân đấu nối VDDIO (chân tùy chọn) |
| 7 |
AUX-CL |
I2C Master Serial Clock cho kết nối cảm biến bên ngoài |
| 8 |
VDDIO |
Chân cấp nguồn I / O digital |
| 9 |
AD0 / SDO |
I2C địa chỉ dữ liệu có trọng số thấp / Chân đầu ra dữ liệu nối tiếp |
| 10 |
REGOUT |
Chân kết nối bộ lọc nhiễu |
| 11 |
FSYNC |
Chân đầu vào đồng bộ hóa khung truyền dữ liệu |
| 12 |
NS |
Chân ngắt |
| 13 |
VDD |
Chân cấp nguồn |
| 18 |
GND |
Chân nối đất |
| 19 |
RESV |
Không kết nối (Tùy chọn) |
| 20 |
RESV |
Chân nối đất (Tùy chọn) |
| 21 |
AUX-DA |
Đầu vào dữ liệu nối tiếp I2C kết nối cảm biến bên ngoài |
| 22 |
nCS |
Chân chọn chip |
| 23 |
SCL / SCLK |
Xung nhịp giao thức nối tiếp I2C / SPI |
| 24 |
SDA / SDI |
Chân dữ liệu nối tiếp I2C / SPI |
Giao tiếp I2C phụ: Giao tiếp này được sử dụng cho giao tiếp cảm biến bên ngoài chip. Nó có hai chế độ là chế độ Master I2C và chế độ Pass-Through.
Đồng bộ hóa khung truyền: Nó được sử dụng để đồng bộ hóa khung dữ liệu trong trường hợp truyền dữ liệu bị lỗi.
I2C: Inter-Integrated Circuit là một giao thức truyền bán song công (truyền dẫn dữ liệu luân phiên theo 2 hướng) cho giao thức nối tiếp.
SPI: Giao tiếp ngoại vi nối tiếp là một giao thức tốc độ cao nhờ có giao thức truyền song công (có thể truyền dữ liệu cùng lúc theo 2 hướng).
VDDIO: Chân cung cấp nguồn cho các chân đầu vào / đầu ra digital.
Các tính năng và thông số kỹ thuật của MPU9250
Sau đây là một số tính năng của DMP MPU 9 trục:
| Tính năng và thiết bị ngoại vi |
khả dụng |
| Kết cấu vi mạch |
MEMS |
| Tốc độ dữ liệu SPI |
1 Mhz |
| Tốc độ đọc dữ liệu nhanh SPI |
20 Mhz |
| Tốc độ dữ liệu I2C |
400 kHz |
| Khả năng chịu sốc |
10.000g |
| Bộ đệm FIFO |
512 byte |
| Giao tiếp I2C phụ trợ |
1 |
| SPI |
1 |
| I2C |
1 |
| Điện áp hoạt động |
2,4-3,6 Volts |
| Dòng điện hoạt động |
3,5mA |
| VDDIO |
Có |
| Cảm biến nhiệt độ đầu ra digital |
Có |
| Độ nhạy chéo |
Tối thiểu |
| Bộ lọc digial do người dùng lập trình |
Có |
| Loại package |
QFN |
| Kích thước |
3x3x1mm |
Tính năng của con quay hồi chuyển
- Nó có một con quay hồi chuyển MEMS 3 trục
- Cảm biến tốc độ góc trục X, Y và Z đầu ra digital (con quay hồi chuyển) với phạm vi tỷ lệ do người dùng lập trình là ± 250, ± 500, ± 1000 và ± 2000 ° /s
- Nó có ba bộ chuyển đổi Analog sang Digital 16 bit
- Nó có bộ lọc low-pass có thể lập trình digital
- Dòng điện hoạt động: 3.2mA
- Dòng điện khi ở chế độ sleep: 8µA
- Hệ số thang đo độ nhạy được hiệu chuẩn tại nhà máy
- Khả năng tự kiểm tra
Tính năng của gia tốc kế
- Nó có một gia tốc kế MEMS ba trục
- Gia tốc kế ba trục đầu ra digital với phạm vi thang đo có thể lập trình là ± 2g, ± 4g, ± 8g và ± 16g
- Nó cũng có ba bộ chuyển đổi tín hiệu analog sang tín hiệu digital với độ phân giải 16-bit
- Dòng hoạt động: 450µA
- Dòng hoạt động công suất thấp: 8,4µA ở 0,98Hz, 19,8µA ở 31,25Hz
- Dòng điện ở chế độ sleep: 8µA
- Chế độ ngắt do người dùng lập trình
- Nó cũng đi kèm với tính năng ngắt khởi động để có công suất tiêu thụ tối ưu cho ứng dụng của bộ xử lý.
- Khả năng tự kiểm tra lỗi
Tính năng của từ kế
- Nó là một từ kế MEMS ba trục
- Cảm biến từ trường hiệu ứng Hall 3 trục làm từ silicon nguyên khối với bộ thu từ tính
- Nó có dải giá trị thay đổi rộng và độ phân giải cao với mức tiêu thụ dòng điện thấp.
- Độ phân giải dữ liệu đầu ra là 14 bit (0,6µT / LSB)
- Nó có dãy giá trị đo lường ± 4800µT
- Dòng điện hoạt động bình thường: 280µA
- Tỷ lệ lặp lại: 8Hz
- Chức năng tự kiểm tra với nguồn từ tính bên trong để xác nhận hoạt động của cảm biến từ tính.
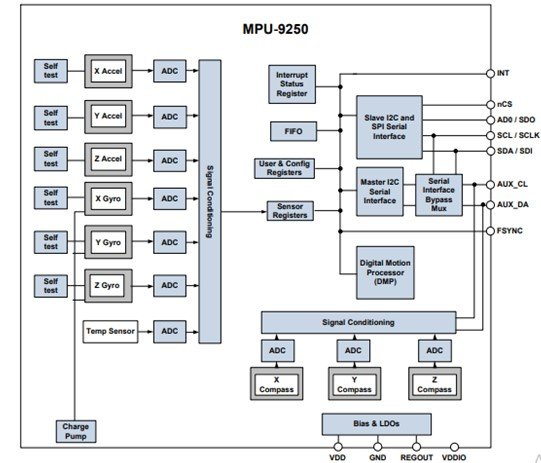
Sơ đồ khối MPU9250
Sơ đồ khối của Bộ xử lý chuyển động digital cho thấy khả năng kết nối của bộ xử lý và thiết bị ngoại vi như sau:
Giao tiếp của MPU9250 DMP với các bộ vi điều khiển được thể hiện trong sơ đồ dưới đây:
Bộ vi điều khiển phải có ít nhất một giao thức truyền dữ liệu nối tiếp SPI hoặc I2C để giao tiếp với module.
Module được cấp nguồn thông qua các chân cấp nguồn
Kết nối các chân analog của vi điều khiển với đường dữ liệu nối tiếp (SDA) và chân xung nhịp cho giao thức nối tiếp (SCA). Quá trình truyền sẽ diễn ra thông qua giao thức I2C.
Module có giao tiếp ngoại vi nối tiếp cũng có thể kết nối.
Đảm bảo có thêm các điện trở kéo lên để tránh mất tín hiệu I2C, nếu bộ vi điều khiển không sử dụng điện trở.
Các ứng dụng MPU9250
- Bộ điều khiển trò chơi dựa trên chuyển động
- Điều khiển từ xa 3D cho DTV được kết nối Internet và hộp giải mã tín hiệu, chuột 3D
- Cảm biến có thể đeo được lên người và giám sát sức khỏe khi hoạt động thể dục và thể thao
- Dịch vụ ứng dụng vị trí địa lí, các địa điểm ưa thích và tính toán chết (tính vị trí hiện tại dựa trên vị trí trước đó với tốc độ và hướng di chuỷen)
- Thiết bị cầm tay và máy chơi game di động
Sơ đồ 2D MPU9250
Bộ xử lý chuyển động digital 9 trục MPU9250 có package 24 Lead QFN. Hình dưới đây mô tả mô hình 2d của Bộ xử lý chuyển động digital 9 trục MPU9250. Nó cho chúng ta biết kích thước vật lý của các thành phần cần thiết khi thiết kế mạch PCB.

>>> Mời anh em xem thêm:
Tán Lục Giác (472)
Tán Hàn - Weldnut (33)
Tán Keo - Lock Nut (226)
Tán Khía - Flange Nut (50)
Tán Dài (3)
Tán Bầu (39)
Tán Khóa (58)
Tán Cánh Chuồn (17)
Tán Cài (6)
Tán Vuông (11)
Vú Mỡ (Nipple Grease) (23)
Nut-With Knurled Heads (24)
Quick-Lock Nuts (16)
Blocks for Adjusting Bolts (207)
Threaded Stopper Blocks (52)
Bearing Lock Nuts (78)
Lông Đền Phẳng - Flat Washer (314)
Lông Đền Vênh - Spring Washer (244)
Lông Đền Vuông (25)
Lông Đền Răng (91)
Lông Đền Vênh Loại Lượn Sóng (7)
Lông Đền Lượn Sóng (15)
Lông Đền Lò Xo Đĩa (25)
Lông Đền Nord-Lock (95)
Lông Đền Heico-Lock (101)
Lông Đền Răng Cưa (77)
Lông Đền Chén (1)
Lông Đền Cầu (5)
Lông Đền Làm Kín (Dạng Phớt) (3)
Gối Đỡ Vòng Bi UCP (69)
Gối Đỡ Vòng Bi UCF (46)
Gối Đỡ Vòng Bi UCPA (6)
Gối Đỡ Vòng Bi UCFC (16)
Gối Đỡ Vòng Bi UCFL (26)
Gối Đỡ Vòng Bi UCFK (3)
Gối Đỡ Vòng Bi UCT (16)
Gối Đỡ UCHA (2)
Gối Đỡ Vòng Bi Đũa Hình Tròn (1)
 Vòng Bi Chuyên Dùng Cho Gối Đỡ (1)
Vòng Bi Chuyên Dùng Cho Gối Đỡ (1)
Vòng Bi UC (45)
Vòng Bi UK (3)
Vỏ Gối Đỡ (22)
Phụ Kiện Gối Đỡ (27)
Con Lăn Bi Loại Ép Chặt (24)
Con Lăn Bi Loại Thân Lục Giác (22)
Con Lăn Bi Loại Thân Tròn (5)
Con Lăn Bi Loại Đế Mặt Bích (4)
Con Lăn Bi Loại Đinh Tán Đầu Tròn (4)
Con Lăn Bi Loại Vít Cấy (12)
Con Lăn Bi Loại Đẩy Bi Có Ren (3)
Con Lăn Bi Loại Đẩy Bi Không Ren (3)
Ball Rollers Press (1)
Ball Plungers Roller (10)
Press Fit Plungers Roller (6)
Đầu Nối Nhanh Khí Nén Thẳng (1340)
Đầu Nối Nhanh Khí Nén Thẳng - Có Ren (2935)
Đầu Nối Nhanh Khí Nén Cong (585)
Đầu Nối Nhanh Khí Nén Cong - Có Ren (2995)
Đầu Nối Nhanh Khí Nén Chữ Y (475)
Đầu Nối Nhanh Khí Nén Chữ Y - Có Ren (557)
Đầu Nối Nhanh Khí Nén Chữ T (514)
Đầu Nối Nhanh Khí Nén Chữ T - Có Ren (1790)
Đầu Nối Nhanh Khí Nén Chữ Thập (70)
Đầu Nối Nhanh Khí Nén Lắp Vách (106)
Đầu Nối Khí Nén Kim Loại (1)

![[Tìm hiểu] Bộ điều khiển chuyển động digital 9 trục MPU9250](https://cms.mecsu.vn/uploads/media/2023/08/bo-dieu-khien-chuyen-dong-digital-9-truc-mpu9250-630x420.png)
![[Tìm hiểu] Breadboard MB102 là gì? cách sử dụng Breadboard MB102](https://cms.mecsu.vn/uploads/media/2023/08/Breadboard-MB102-2-568x420.jpeg)
![[Tìm hiểu] ESP32-CAM AI-Thinker Board là gì?](https://cms.mecsu.vn/uploads/media/2023/08/thanh-phan-ESP32-CAM-696x389.jpeg)
![[Tìm hiểu] Bộ điều khiển tai nghe TPA6138A2PW](https://cms.mecsu.vn/uploads/media/2023/08/bo-dieu-khien-tai-nghe-tpa6138a2pw.jpeg)
![[Kiến thức] Module ổn áp điện một chiều DC LTC3780](https://cms.mecsu.vn/uploads/media/2023/08/cac-thanh-phan-LTC3780-696x385.png)
![[Mẹo 2025] Cách tính công suất điều hòa chuẩn nhất](https://cms.mecsu.vn/uploads/media/2023/08/tieu-chuan-lap-dat-may-lanh-630x420.jpg)