Trong các hệ thống điều khiển servo, phản hồi cho điều khiển vị trí, vận tốc và / hoặc mô-men xoắn thường được cung cấp bởi bộ mã encoder được gắn vào động cơ.
Nhưng các thành phần cơ khí và kết nối trong hệ thống truyền động chẳng hạn như hộp số, vít me bi và khớp nối không hoàn toàn cứng và tạo ra backflash, windup vào hệ thống.
Điều này gây ra sự khác biệt giữa vị trí tải “should” dựa trên vị trí của trục động cơ và vị trí thực sự của tải. Nếu hệ thống điều khiển servo chỉ dựa trên phản hồi của động cơ, thì vị trí mong muốn có thể không bao giờ đạt được và hệ thống có thể gặp sự cố không ổn định như dao động.
Trong các hệ thống có tạo ra backlash, windup (nghĩa là hầu như tất cả các hệ thống chuyển động) nhưng cũng cần điều khiển vị trí rất chính xác, cần có bộ mã hóa thứ hai để đo trực tiếp vị trí của tải.
Phương pháp này sử dụng hai thiết bị phản hồi một trên động cơ và một đặt ở tải thường được gọi là dual-loop control, hoặc phản hồi vòng kép.
Có một số phương pháp hoạt động với điều khiển vòng kép, nhưng trong phương pháp cơ bản nhất, đầu tiên bộ điều khiển đóng vòng bên trong, đó là vòng điều khiển vận tốc.
Vòng điều khiển vận tốc nhận phản hồi từ bộ mã hóa động cơ và phản hồi này xác định độ lợi phản hồi vận tốc thích hợp (Kv), truyền tác động giảm chấn lên hệ thống để giảm dao động.
Chú ý: độ lợi phản hồi vận tốc (Kv) tương tự như độ lợi đạo hàm (Kd), ngoại trừ độ lợi phản hồi vận tốc chỉ tính theo vận tốc được đo bởi bộ mã hóa động cơ, trong khi độ lợi đạo hàm tính theo sai số vị trí. Độ lợi phản hồi vận tốc thường được sử dụng trong điều khiển vòng kép.
Tiếp theo, bộ điều khiển vòng kín lặp bên ngoài. Phản hồi từ bộ mã hóa tải được sử dụng để xác định độ lợi tích phân và tỷ lệ (Ki và Kp).
Độ lợi tỷ lệ tỉ lệ thuận với sai số định vị và ảnh hưởng đến độ cứng của hệ thống, trong khi độ lợi tích phân tích lũy sai số vị trí theo thời gian và “đẩy” hệ thống về không sai số định vị.
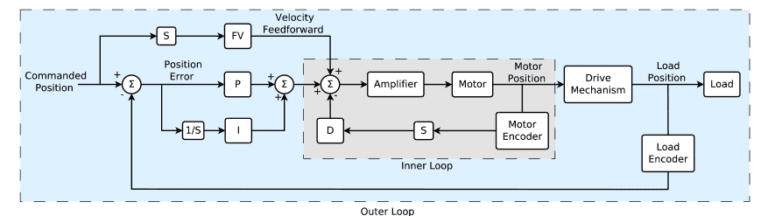
Hệ thống điều khiển servo cũng có thể bao gồm một vòng điều khiển current loop, được đặt bên trong vòng vận tốc. Mặc dù trong trường hợp này sẽ có ba vòng điều khiển, thuật ngữ “điều khiển vòng kép” chỉ đơn giản đề cập đến hai vòng điều khiển - vị trí và vận tốc - nhận phản hồi trực tiếp từ bộ mã hóa encoder.
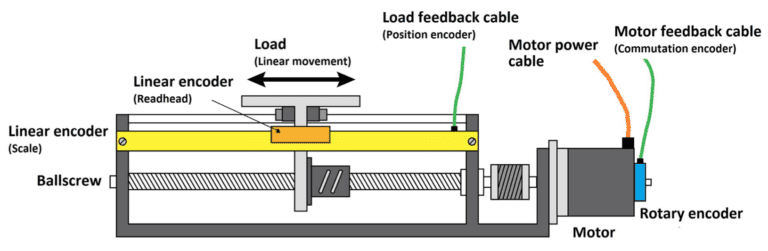
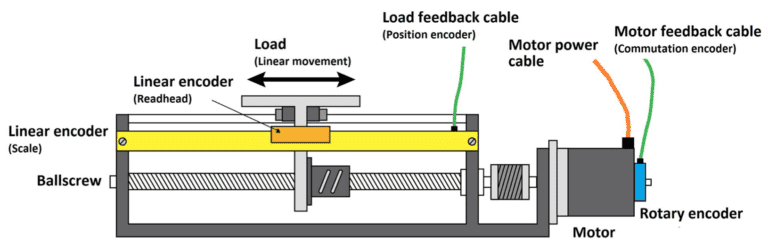
Hệ thống phản hồi vòng kép có thể sử dụng hai bộ mã hóa quay hoặc một bộ mã hóa quay và một bộ mã hóa tuyến tính.
Kết hợp tuyến tính-quay phổ biến nhất trên các hệ thống chuyển động tuyến tính, trong đó có một bộ mã hóa quay (hoặc bộ phân giải) nằm trên động cơ và một bộ mã hóa tuyến tính được gắn trên trục tuyến tính.
Bạn có thể tự hỏi, "Tại sao không chỉ đặt bộ mã hóa tại chỗ tải - vì từ đó nó sẽ đo vị trí mà chúng tôi đang cố gắng kiểm soát - và loại bỏ bộ mã hóa động cơ?"
Nếu phản hồi chỉ được đặt trên tải mà không có thông tin về vị trí, vận tốc hoặc mô-men xoắn của động cơ, hoạt động của động cơ có thể trở nên không ổn định nếu việc khử khớp nối này xảy ra cùng lúc bộ điều khiển đang gửi lệnh điều chỉnh vị trí đến động cơ.
>>> Mời anh em xem thêm:
Gối Đỡ Vòng Bi Cầu UCP (74)
Gối Đỡ Vòng Bi Cầu Mặt Bích Vuông UCF (65)
Gối Đỡ Vòng Bi Cầu UCPA (9)
Gối Đỡ Vòng Bi Cầu Mặt Bích Tròn UCFC (15)
Gối Đỡ Vòng Bi Cầu Mặt Bích Hình Thoi UCFL (20)
Gối Đỡ Vòng Bi Cầu Chữ T UCT (20)
Gối Đỡ Vòng Bi Đũa UCP (3)
Gối Đỡ Vòng Bi Đũa Mặt Bích Vuông UCF (1)
Gối Đỡ Vòng Bi Mắt Trâu (20)
Gối Đỡ Hai Nửa (31)
Măng Xông Vòng Bi (3)
Vòng Bi UC - UK (82)
Vỏ Gối Đỡ (1)
Vòng Đệm Khóa (22)
Phụ Kiện Gối Đỡ (54)
Con Lăn Bi Loại Ép Chặt (7)
Con Lăn Bi Loại Thân Lục Giác (8)
Con Lăn Bi Loại Thân Tròn (5)
Con Lăn Bi Loại Đế Mặt Bích (3)
Con Lăn Bi Loại Đinh Tán Đầu Tròn (4)
Con Lăn Bi Loại Vít Cấy (4)
Con Lăn Bi Loại Đẩy Bi Không Ren (3)
Ball Rollers Press (1)
Ball Plungers Roller (10)
Press Fit Plungers Roller (6)
Bộ Đầu Cos - Terminal Kits (3)
Đầu Cosse Chĩa Chữ Y (38)
Đầu Cosse Tròn (132)
Đầu Cosse Bít SC - TL (75)
Đầu Cosse Ghim (54)
Đầu Cosse Pin Đặc (19)
Đầu Cosse Pin Dẹp (22)
Đầu Cosse Pin Rỗng (77)
Đầu Cosse Nối Thẳng (31)
Đầu Cosse Chụp Nối Dây (8)
Đầu Cosse Vuông (8)
Mũ Chụp Đầu Cosse (127)
Giắc Cắm Điện Ô Tô (14)
 Others of Vòng Bi
Others of Vòng Bi