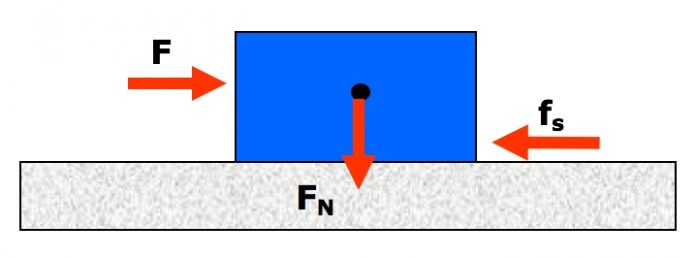
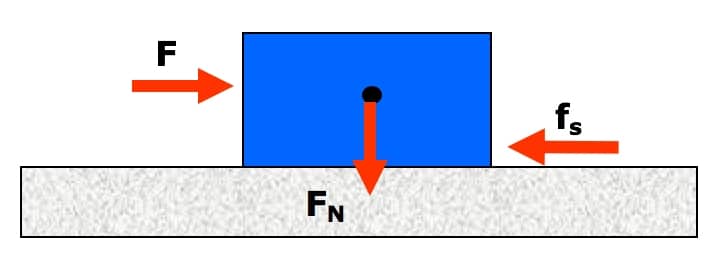
Ma sát, là lực cản chuyển động tương đối giữa hai vật thể, xảy ra trong mọi chuyển động trượt và lăn. Một số bộ phận sử dụng chất bôi trơn để ngăn cách các bề mặt lăn hoặc trượt chẳng hạn như ổ trục và bánh răng thường có hai loại ma sát: ma sát tĩnh và ma sát động.
Ma sát tĩnh còn được gọi là "ma sát nghỉ" là ma sát xảy ra khi bắt đầu chuyển động, khi liên kết giữa hai bề mặt bị phá vỡ và lớp bôi trơn bắt đầu hình thành.
Ma sát tĩnh và ma sát động với nhau đôi khi được gọi là “ma sát Coulomb” (theo tên kỹ sư và nhà vật lý người Pháp, Charles-Augustin de Coulomb). Khi lớp bôi trơn được hình thành phù hợp, ma sát trở nên tỷ lệ thuận với tốc độ tương đối của các bề mặt.
Hiểu được các loại ma sát có trong các bộ phận điều khiển chuyển động là rất quan trọng vì ma sát đặt ra một thách thức đặc biệt đối với việc điều chỉnh hệ thống servo.
Ma sát tĩnh, xảy ra khi hệ thống vượt qua vận tốc bằng không (khi hệ thống bắt đầu chuyển động từ trạng thái nghỉ hoặc khi xảy ra sự thay đổi hướng), nó là vấn đề khó khăn vì nó có thể khiến hệ thống vượt quá vị trí, vận tốc hoặc mô-men xoắn dự định của nó,và sau đó dao động khi lực ma sát giảm xuống và hệ thống tìm ra điểm đặt.
Và trong trường hợp xấu nhất, ma sát tĩnh có thể ngăn cản chuyển động hoàn toàn.
Về lý thuyết, ma sát tĩnh có thể được bù đắp bằng cách tăng độ lợi trong vòng điều khiển servo - đặc biệt là độ lợi tỷ lệ và / hoặc tích phân. Tuy nhiên, điều này sẽ gây ra sự mất ổn định khi chuyển động bắt đầu và ma sát chuyển từ tĩnh sang động.
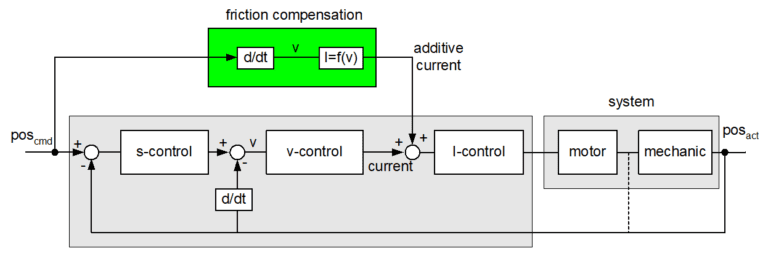
Một phương pháp bù ma sát là điều khiển feed-forward. Cách thực hiện phổ biến nhất của tiến trình tiến để bù cho ma sát đặc biệt là ma sát tĩnh là thêm điều khiển feed-forward phụ thuộc vào vận tốc vào câu lệnh hiện tại.
Điều này làm tăng lượng dòng điện gửi đến động cơ, do đó động cơ phát triển đủ mô-men xoắn để vượt qua ma sát khởi động cao (tĩnh).
Độ lợi chuyển tiếp là một hành động điều khiển ước tính đầu ra lý tưởng từ thuật toán điều khiển, dự đoán các lệnh cần thiết để đạt được lỗi bằng không và đưa các lệnh này làm tín hiệu phụ vào vòng điều khiển.
Độ lợi feed-forward là điều khiển ước tính đầu ra lý tưởng từ thuật toán điều khiển, dự đoán các lệnh cần thiết để đạt được sai số bằng không và đưa các lệnh này làm tín hiệu phụ vào vòng điều khiển.
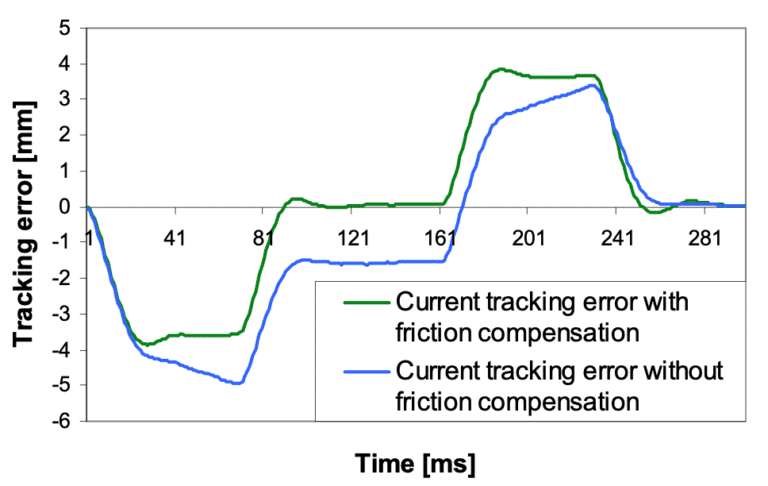
Tuy nhiên, vì lực ma sát giảm xuống trong nhiều trường hợp đáng kể khi chuyển động đang diễn ra, "friction compensation window" (một thuật ngữ được sử dụng bởi Rockwell Automation) cũng có thể được xác định.
Tham số này chỉ định thời điểm và mức độ bù ma sát được áp dụng, dựa trên mức độ sai số hoặc vận tốc của trục. Nói cách khác, friction compensation window đảm bảo rằng mô-men xoắn được bổ sung là đủ cho loại ma sát (tĩnh hoặc động) mà hệ thống đang gặp phải tại bất kỳ thời điểm nhất định nào.
Bù ma sát có sẵn trong hầu hết các bộ điều khiển servo và thường được triển khai trong các thuật toán tự động điều chỉnh. Mặc dù nó hữu ích cho hầu hết mọi hệ thống có ma sát tĩnh cao, bù ma sát thường được sử dụng nhất trong các ứng dụng yêu cầu quỹ đạo rất chính xác, chẳng hạn như chuyển động phối hợp và cấu hình đường bao.
>>> Mời anh em xem thêm:
Gối Đỡ Vòng Bi Cầu UCP (74)
Gối Đỡ Vòng Bi Cầu Mặt Bích Vuông UCF (65)
Gối Đỡ Vòng Bi Cầu UCPA (9)
Gối Đỡ Vòng Bi Cầu Mặt Bích Tròn UCFC (15)
Gối Đỡ Vòng Bi Cầu Mặt Bích Hình Thoi UCFL (20)
Gối Đỡ Vòng Bi Cầu Chữ T UCT (20)
Gối Đỡ Vòng Bi Đũa UCP (3)
Gối Đỡ Vòng Bi Đũa Mặt Bích Vuông UCF (1)
Gối Đỡ Vòng Bi Mắt Trâu (20)
Gối Đỡ Hai Nửa (31)
Măng Xông Vòng Bi (3)
Vòng Bi UC - UK (82)
Vỏ Gối Đỡ (1)
Vòng Đệm Khóa (22)
Phụ Kiện Gối Đỡ (54)
Con Lăn Bi Loại Ép Chặt (7)
Con Lăn Bi Loại Thân Lục Giác (8)
Con Lăn Bi Loại Thân Tròn (5)
Con Lăn Bi Loại Đế Mặt Bích (3)
Con Lăn Bi Loại Đinh Tán Đầu Tròn (4)
Con Lăn Bi Loại Vít Cấy (4)
Con Lăn Bi Loại Đẩy Bi Không Ren (3)
Ball Rollers Press (1)
Ball Plungers Roller (10)
Press Fit Plungers Roller (6)
Bộ Đầu Cos - Terminal Kits (3)
Đầu Cosse Chĩa Chữ Y (38)
Đầu Cosse Tròn (132)
Đầu Cosse Bít SC - TL (75)
Đầu Cosse Ghim (54)
Đầu Cosse Pin Đặc (19)
Đầu Cosse Pin Dẹp (22)
Đầu Cosse Pin Rỗng (77)
Đầu Cosse Nối Thẳng (31)
Đầu Cosse Chụp Nối Dây (8)
Đầu Cosse Vuông (8)
Mũ Chụp Đầu Cosse (127)
Giắc Cắm Điện Ô Tô (14)
 Others of Vòng Bi
Others of Vòng Bi