TMC2209 SilentStepStick là bộ điều khiển bước/hướng quay cho động cơ bước lưỡng cực hai pha có dòng điện đỉnh lên đến 2,8A và dòng điện RMS ở 2A.
Nó có thể điều khiển động cơ bước lưỡng cực 2 pha ở chế độ từ 1 đến 1/256 bước. Trên hết, TMC2209 cung cấp chuẩn giao tiếp UART dễ dàng sử dụng và điều khiển với sự trợ giúp của vi điều khiển có cổng UART.

Giới thiệu TMC2209
TMC2209 là một module điều khiển động cơ bước được giới thiệu bởi TRIAMINIC. Module TMC2209 được thiết kế với công nghệ TRIAMINIC độc quyền giúp module điều khiển không ồn và có độ chính xác cao.
Module động cơ bước này được lập trình với tần số 12,5 MHz ở bộ dao động bên trong, để truyền dữ liệu UART nối tiếp và kích hoạt các độ phân giải bước cao đầy đủ lên đến 1/256 bước, đạt được độ mượt mà.
Các bước này có thể được cấu hình ở 9 cách cài đặt độ phân giải vi bước khác nhau. Thiết bị này có công suất thấp, tiết kiệm chi phí và đáng tin cậy.
TMC2209 có ứng dụng đặc biệt trong các dự án robot, in 3D và tự động hóa. Hướng dẫn này là một hướng dẫn giới thiệu về sơ đồ chân, sơ đồ 2D, đặc tính, thông số kỹ thuật, giao tiếp và ứng dụng.
Sơ đồ chân của bộ điều khiển động cơ bước TMC2209
Sơ đồ sau đây là sơ đồ chân của module điều khiển động cơ bước TMC2209:
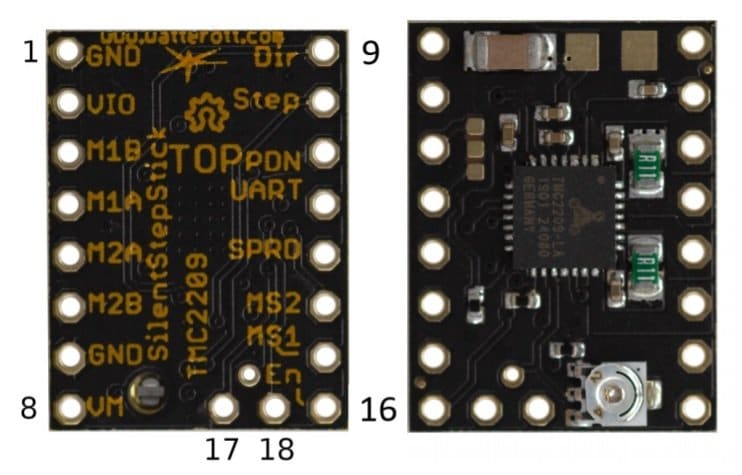
Cấu hình chân
Chúng tôi sẽ nói về sơ đồ chân của module điều khiển động cơ bước 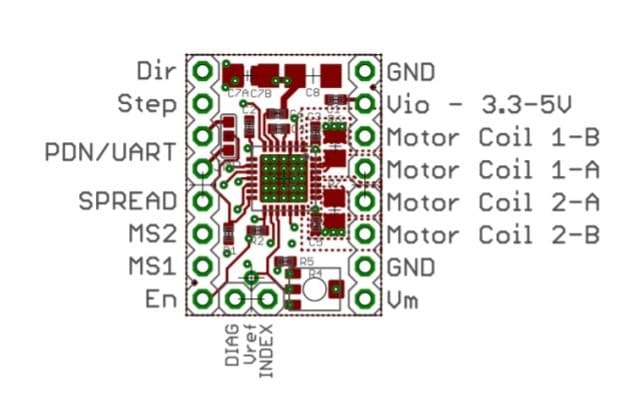 . Chipset có tổng cộng 28 chân, trong đó chỉ có 18 chân mở rộng trên mô-đun.
. Chipset có tổng cộng 28 chân, trong đó chỉ có 18 chân mở rộng trên mô-đun.
Chi tiết cấu hình chân của các chân mở rộng trong bảng được đề cập dưới đây:
| Tên chân |
Đặc điểm |
| VM |
Chân cấp nguồn động cơ - Kết nối nguồn điện của Arduino tới chân này |
| GND |
Chân nối đất |
| M2B |
Chân 2B cuộn dây động cơ |
| M2A |
Chân 2A cuộn dây động cơ |
| M1B |
Chân 1B cuộn dây động cơ |
| M1A |
Chân 1A cuộn dây động cơ |
| VIO |
Chân nguồn cấp logic |
| DIR |
Chân đầu vào xác định hướng quay động cơ |
| STEP |
Chân đầu vào tín hiệu bước động cơ |
| PDN_UART |
Điều khiển ngắt nguồn hoặc là chân UART (GND = 0, VIO = tắt) |
| SPREAD |
Chân chọn chế độ chopper. Nếu ở mức cao, SpreadCycle được chọn và nếu ngược lại Stealthchop được chọn. |
| MS2 |
Chân cấu hình vi bước |
| MS1 |
Điều chỉnh độ phân giải vi bước |
| EN |
Chân cho phép đầu ra (GND = 0, VIO = tắt) |
| DIAG |
Chân phát hiện lỗi đầu ra (VIO = error) |
| VREF |
Chân điện áp tham chiếu |
| INDEX |
Chân thứ tự đầu ra (một xung cho mỗi bốn chân) |
Thông số kỹ thuật TMC2209
- Điện áp hoạt động: 4,75 Volts - 28 Volts
- Tần số xung nhịp nội tối đa: 12,5 MHz
- Dòng điện lớn nhất mỗi pha: 2 A
- Dòng đầu ra đỉnh: 2,8 A
- Module được thiết kế cho động cơ bước hai pha.
- Nó được tích hợp giao tiếp với STEP / DIR có thể điều chỉnh và cấu hình ở các cài đặt 8, 16, 32 và 64.
- Một dây UART được sử dụng để giao tiếp với các bộ vi điều khiển.
- Một bộ tạo xung được lập trình để thiết bị hoạt động ở chế độ độc lập. Ngoài ra, chế độ nguồn standby cho mục đích tối ưu năng lượng.
- Để đảm bảo độ tin cậy và khả năng bảo vệ, các thuộc tính bảo vệ và phát hiện lỗi được trang bị.
Công nghệ TRIAMINIC TMC2209
- TRIAMINIC đã phát triển một số bằng sáng chế công nghệ giúp thị trường linh kiện có thể kết hợp với nhiều loại module.
- StealthChop2 ™ Một sáng chế công nghệ có độ chính xác cao và không gây tiếng ồn cho chuyển động im và động cơ không nghe tiếng. Nó cho phép tăng tốc và giảm tốc nhanh hơn StealthChop ™ và có dòng diện dừng thấp.
- SpreadCycle ™ là công nghệ chuyển động năng động cao nhất bằng cách kiểm soát dòng điện theo chu kỳ.
- Bộ nội suy vi bước MicroPlyer ™ giúp vận hành đầy đủ 256 bước siêu nhỏ đạt độ mượt mà với độ phân giải thấp nhất và đạt hiệu quả tối đa.
- StallGuard4 ™ Chức năng không cảm biến, báo tình trạng quá tải của động cơ khi nó đạt đến điểm dừng cơ học.
- CoolStep ™ Để đạt hiệu quả tốt và ít nóng hơn cho động cơ bước 2 pha và điều khiển bộ đo StallGuard.
Sơ đồ khối TMC2209
Sơ đồ khối của module điều khiển động cơ bước TMC2209 để hình dung tốt hơn về các bộ phận bên trong được đưa ra dưới đây:
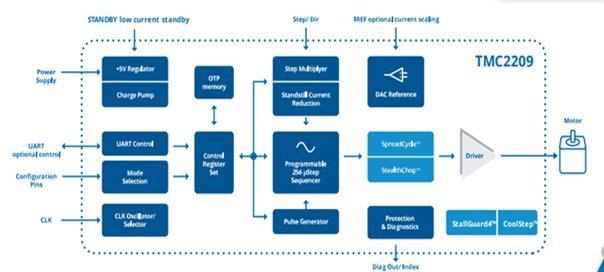
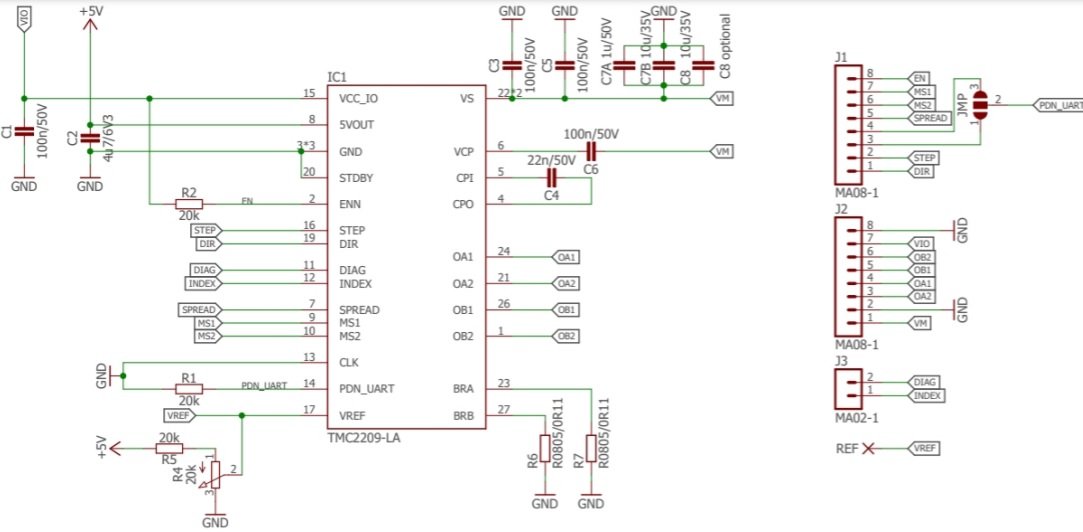
Sơ đồ mạch bên trong TMC2209
Giao tiếp module điều khiển động cơ bước TMC2209 với vi điều khiển
Phần này đề cập đến giao tiếp của module điều khiển động cơ bước TMC2209 với bộ vi điều khiển.
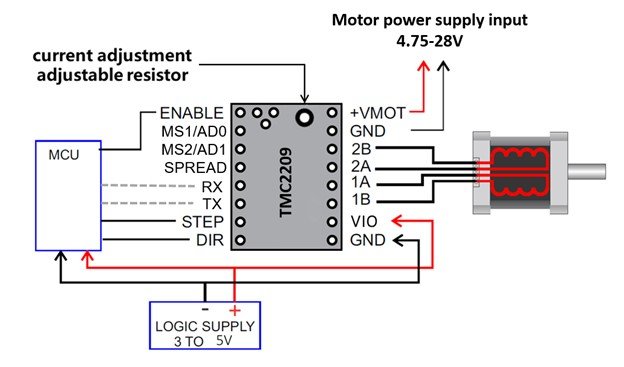
Module điều khiển động cơ bước TMC2209 hoạt động giống như module A4988. Sự khác biệt là nó sử dụng các công nghệ Stealthchop2, StallGuard cho chuyển động động không ồn ào và hiệu quả cho động cơ bước.
Module được cấp nguồn thông qua các chân VIO và GND kết nối với các chân nguồn MCU thường nằm trong khoảng từ 3 V đến 5 V. Để đảm bảo động cơ hoạt động, chân VMOT được kết nối với điện áp cung cấp khoảng 4,75 - 28 V.
4 chân động cơ đầu ra sẽ được kết nối với các cuộn dây của động cơ bước 2 pha. Các chân EN, STEP và DIR cũng được đấu nối. Chân EN kích hoạt các đầu ra động cơ trong lúc cấu hình STEP cho động cơ.
DIR chịu trách nhiệm xác định hướng của động cơ theo chiều kim đồng hồ hoặc ngược chiều kim đồng hồ. Module điều khiển động bước TMC2209 có khả năng thiết lập độ phân giải bước của nó theo 9 cách khác nhau, bằng cách thiết lập các mức logic của các chân MS1 và MS2, với các phép đo mong muốn.
Trong trường hợp ở Arduino, nên cài đặt thư viện TMCStepper trong Arduino IDE để giao tiếp module. Các mẫu code ví dụ có sẵn trong thư viện Arduino để tìm hiểu và quan sát việc thực thi code và sau đó tự viết code theo yêu cầu.
Lựa chọn thay thế TMC2209
Ứng dụng TMC2209
- Ứng dụng liên quan 3D
- Nhà tự động
- Người máy
- Máy ATM
- Mục đích an ninh
- Ngành dệt may
- Máy in & Máy quét
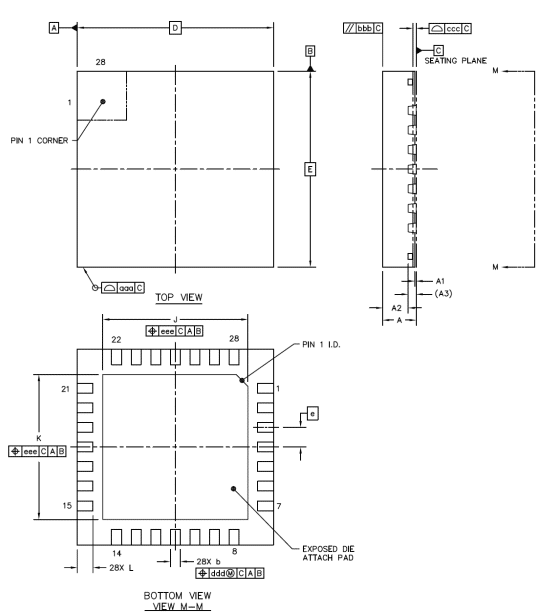
Sơ đồ 2D TMC2209
>> Mời anh em xem thêm
Gối Đỡ Vòng Bi Cầu UCP (74)
Gối Đỡ Vòng Bi Cầu Mặt Bích Vuông UCF (65)
Gối Đỡ Vòng Bi Cầu UCPA (9)
Gối Đỡ Vòng Bi Cầu Mặt Bích Tròn UCFC (15)
Gối Đỡ Vòng Bi Cầu Mặt Bích Hình Thoi UCFL (20)
Gối Đỡ Vòng Bi Cầu Chữ T UCT (20)
Gối Đỡ Vòng Bi Đũa UCP (3)
Gối Đỡ Vòng Bi Đũa Mặt Bích Vuông UCF (1)
Gối Đỡ Vòng Bi Mắt Trâu (20)
Gối Đỡ Hai Nửa (31)
Măng Xông Vòng Bi (3)
Vòng Bi UC - UK (82)
Vỏ Gối Đỡ (1)
Vòng Đệm Khóa (22)
Phụ Kiện Gối Đỡ (54)
Con Lăn Bi Loại Ép Chặt (7)
Con Lăn Bi Loại Thân Lục Giác (8)
Con Lăn Bi Loại Thân Tròn (5)
Con Lăn Bi Loại Đế Mặt Bích (3)
Con Lăn Bi Loại Đinh Tán Đầu Tròn (4)
Con Lăn Bi Loại Vít Cấy (4)
Con Lăn Bi Loại Đẩy Bi Không Ren (3)
Ball Rollers Press (1)
Ball Plungers Roller (10)
Press Fit Plungers Roller (6)
Bộ Đầu Cos - Terminal Kits (3)
Đầu Cosse Chĩa Chữ Y (38)
Đầu Cosse Tròn (132)
Đầu Cosse Bít SC - TL (75)
Đầu Cosse Ghim (54)
Đầu Cosse Pin Đặc (19)
Đầu Cosse Pin Dẹp (22)
Đầu Cosse Pin Rỗng (77)
Đầu Cosse Nối Thẳng (31)
Đầu Cosse Chụp Nối Dây (8)
Đầu Cosse Vuông (8)
Mũ Chụp Đầu Cosse (127)
Giắc Cắm Điện Ô Tô (14)
 Others of Vòng Bi
Others of Vòng Bi 

![[Tìm hiểu] DS1990A iButton Số seri 64-bit](https://cms.mecsu.vn/uploads/media/2023/08/So-do-khoi-DS1990A-534x300.jpeg)

![[REVIEW] Các loại thước đo phổ biến trên thị trường hiện nay](https://cms.mecsu.vn/uploads/media/2024/10/anh-bia-thuoc.jpg)